En los sistemas de navegación actuales se hace uso de multitud de sensores para medir posiciones, orientaciones o velocidades. Uno de los sensores de navegación de gran interés en el mundo de la robótica y en vehículos aéreos y marítimos es el sensor de Doppler. Gracias a este dispositivo somos capaces de medir la velocidad absoluta de un cuerpo con respecto a la tierra. Veamos cómo funciona.
Seguramente muchos habréis oído hablar del famoso efecto Doppler en el que una onda en movimiento relativo con respecto un emisor modifica su frecuencia. Este efecto lo descubrió el austríaco Christian Andreas Doppler en 1842 en una investigación referente a la luz procedente de las estrellas.
Unos años más tarde Christoph Hendrik Diederik Buys Ballot aplicó este principio para el caso de ondas sonoras y determinó que el tono que percibimos de un sonido emitido por una fuente que se acerca a nosotros es más agudo que si se alejase. Este efecto lo hemos experimentado en multitud de ocasiones cuando escuchamos la sirena de una ambulancia acercarse y alejarse, o en una estación de tren cuando la locomotora utiliza su silbato.
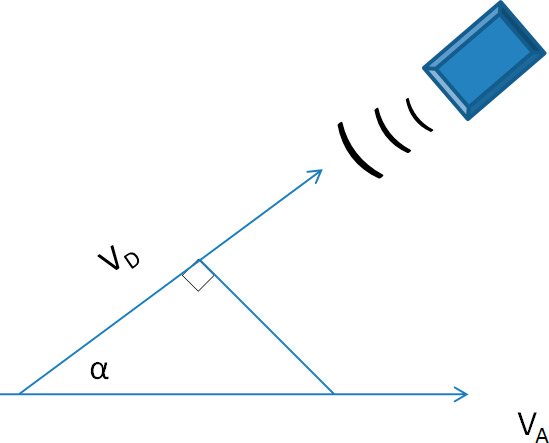
¿Cómo podemos hacer uso de este efecto para nuestro beneficio? ¿Podemos medir la velocidad relativa analizando este efecto? Observemos la expresión que relaciona estas magnitudes

La velocidad del terreno con respecto a un vehículo Va, se obtiene a partir de la velocidad Vd Doppler medida según la ecuación anterior, siendo FD la variación en frecuencia que observamos, Fo la frecuencia de transimisión, c la velocidad de la luz y alpha el ángulo de incidencia.
De esta forma si transmitimos una onda electromagnética hacia un objeto (de la cual conocemos evidentemente su frecuencia), medimos la frecuencia de la onda recibida al reflejarse en él, y conocemos los demás parámetros, seremos capaces de medir la velocidad Va. Este es el mecanismo básico que utilizan muchos vehículos aéreos y marítimos y que seguro habréis visto en multitud de películas.
En la práctica este proceso no es tan sencillo, ya que no recibiremos únicamente la onda reflejada en el objeto, sino también una serie de interferencias y señales de otro tipo, por lo que es necesario realizar una serie de filtrados previos en la señal. Además, existe una serie de errores en la medida como consecuencia de las componentes verticales de la velocidad del objeto debido a la irregularidad del terreno, la incertidumbre en el ángulo real de incidencia, etc.
Los sensores que se utilizan en vehículos marítimos emplean energía acústica que se refleja en el fondo del mar, sin embargo, los vehículos aéreos emplean radiofrecuencia, reflejándose las microondas en la superficie de la tierra. Para mejorar el funcionamiento, se suele hacer uso de varios sensores en direcciones diferentes. Así, en los sistemas aéreos o marítimos se suelen emplear cuatro sensores en 90º grados entre sí de diferencia de azimut y con el mismo ángulo de inclinación hacia abajo respecto al plano horizontal.

No hay comentarios:
Publicar un comentario